联系电话:18520175978(微信同号)

在广袤的海洋中,光线衰减迅速,电磁波传播受阻,而声波却能如“海洋信使”般远距离传递。
声呐(Sonar,Sound Navigation and Ranging)作为利用声波探测水下目标的主要设备,自二战时期诞生以来,便成为人类探索海洋、保障国防的关键装备。
从潜艇探测到海洋测绘,从渔业资源调查到水下考古,声呐的应用场景十分广泛。
一、什么是声呐?
声呐,即 “声音导航与测距”的缩写,本质是 “水下的雷达”—— 与依赖电磁波的雷达不同,它以声波为信息载体,捕捉水下目标的关键信息,是人类在黑暗深海中 “看见” 世界的重要手段。

声呐的工作逻辑遵循“发射-传播-反射-接收-处理”的闭环:
当声呐系统向水下发射特定频率的声波信号后,声波遇到目标会产生反射(回声),剩余声波则继续传播或被环境吸收;接收换能器捕获回声信号后,经信号处理提取目标的距离、方位、速度等关键信息。

二、声呐的分类
声呐的分类维度主要有两种:按工作方式可分为主动式与被动式,核心差异在于是否主动发射声波。
主动声呐通过主动发射声波并接收目标回声实现探测,其优势是可获取目标的距离、方位、速度等完整信息,即使目标静止也能有效探测。

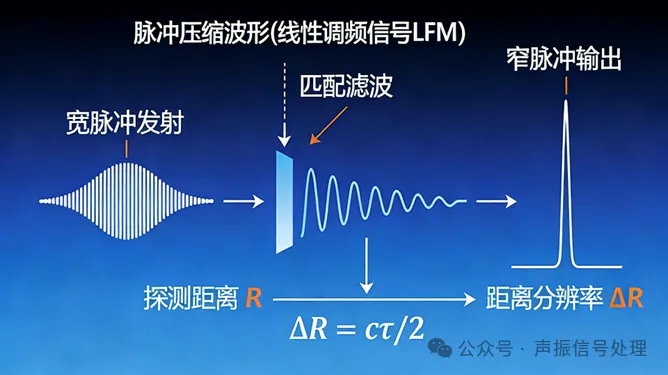
主动式声呐的关键技术在于波形设计与目标检测。例如,脉冲压缩波形(如线性调频信号LFM)可在保证探测距离的同时提高距离分辨率——通过发射宽脉冲以提升能量,接收后经匹配滤波压缩为窄脉冲,从而兼顾远距探测与高精度定位。
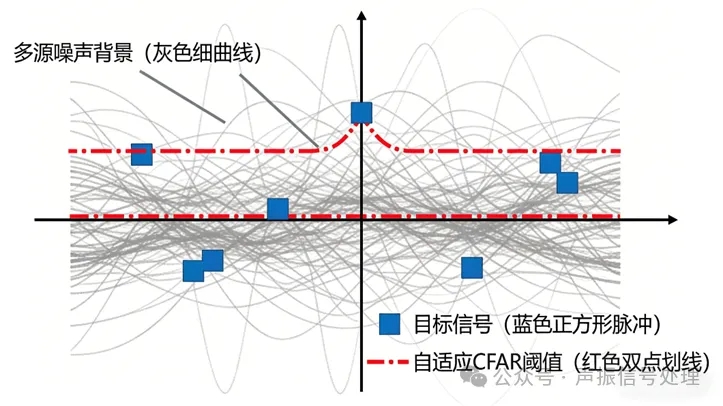
在目标检测中,常采用恒虚警率(CFAR)检测算法,通过自适应调整检测阈值,在复杂噪声环境中稳定识别目标,避免误检与漏检。
被动声呐的核心特征是不主动发射信号,仅接收目标辐射的声波(如潜艇发动机噪声、螺旋桨旋转噪声、舰船航行湍流噪声等),凭借静默工作特性,成为军事反潜、隐蔽侦察的核心装备。
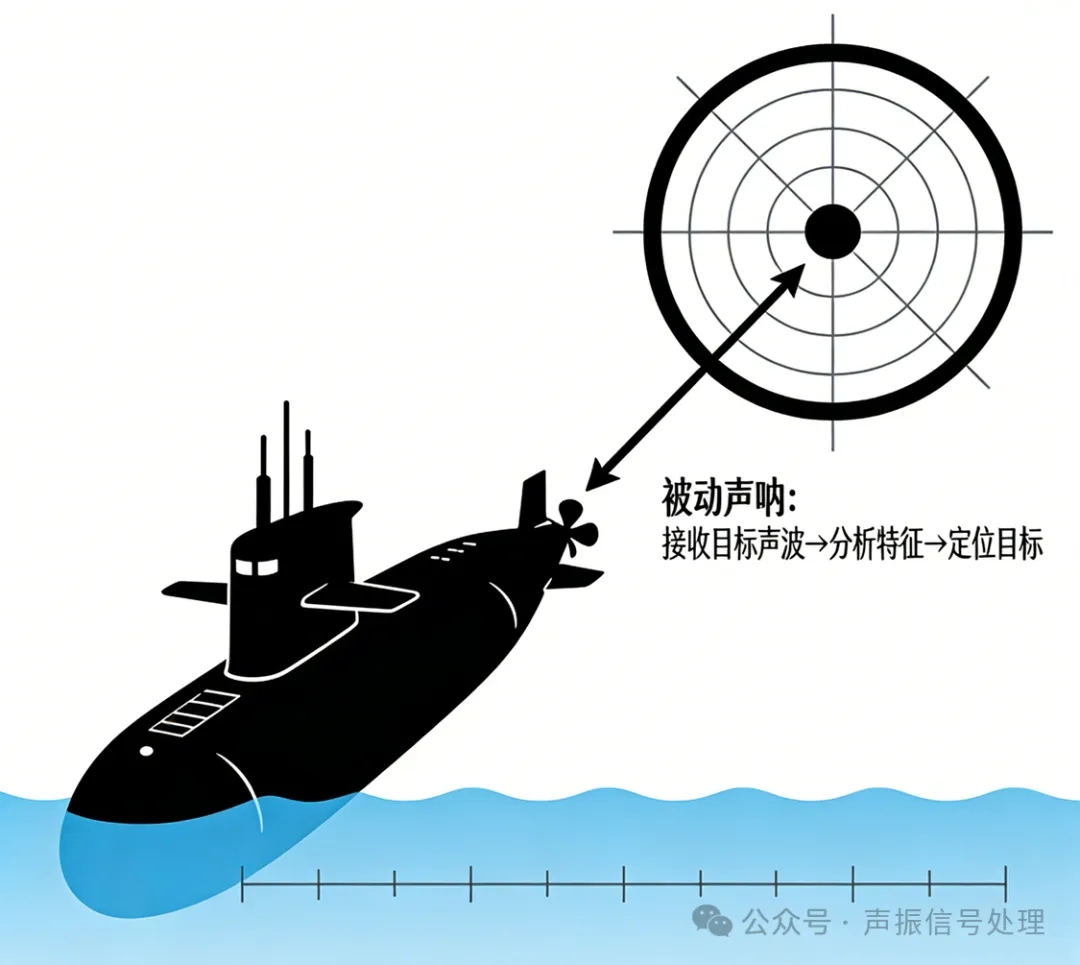
被动声呐工作流程围绕 “信号接收-定向聚焦-提纯处理-信息呈现” 闭环展开,各环节与稳定同步设备时序深度协同,保障探测精准实时。
被动声呐的性能依赖于“噪声源识别”与“方位估计”技术。目标辐射噪声具有特定的频谱特征,例如:
螺旋桨噪声在低频段呈现线谱特性,
发动机噪声则以宽带噪声为主,
通过频谱分析(如傅里叶变换)可实现目标类型识别。
按部署形式又可分为舰壳式、拖曳式、舷侧式等。两类分类维度相互交叉(如拖曳式声呐可分为主动型与被动型),共同构成了覆盖不同场景的水下探测体系。
舰壳式声呐是舰艇 “水下耳目”,换能器基阵安装于舰首导流罩或潜艇艇首,具备主/被动双模式,可探测水下目标、导航避障、反潜。

“阿穆尔”级潜艇共形阵艇艏声呐-图片来源于网络
拖曳式声呐是将换能器基阵利用拖缆拖于平台尾后的水下探测系统,核心优势是远离本舰噪声、可变深度作业、探测距离远,常与舰壳声呐互补,构成反潜/反鱼雷的远程与近程兼顾的双层探测体系,广泛装备于水面舰艇、潜艇、反潜机与监视船。

舷侧式声呐(舷侧阵声呐)是将大型换能器基阵沿潜艇/水面舰两舷布置的水下探测系统,核心优势是孔径大、低频性能好、覆盖舷两侧广扇区,与舰壳声呐、拖曳声呐形成互补,是现代潜艇远程警戒与目标识别的关键装备。

舷侧式声呐-图片来源于网络
三、声呐的载体—声波
声呐的所有探测功能,其核心都建立在声波在海洋环境中的传播规律之上。
声波是一种机械波,由物体振动产生,可以通过介质(如海水)的振动传递能量,这与依赖电磁场传播的电磁波截然不同。也正是这一特性,让声波在海水里具备了电磁波无法比拟的传播优势。

从物理参数维度来看,声呐性能与声波的频率、功率密切相关:
低频声波(数十至数百赫兹)衰减慢、传播距离远,适用于远距离探测任务;
高频声波(数千赫兹至数十千赫兹)方向性强、分辨率高,适合近距离高精度成像场景。
频率特性决定了各类声呐的应用场景选型。

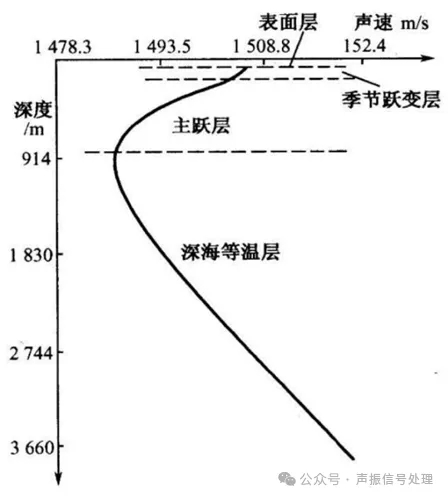
在海洋中,声波的传播速度并非恒定,而是受温度、盐度和压力(深度)三大因素共同影响。
海水声速是温度(T)、盐度(S)、压力(P) 的函数,工业界和科研中最常用的是简化威尔逊公式(Wilson's Formula),公式如下:

公式中 4.6T 是最大贡献项,表层温度高(如 20°C)时,声速≈1539 m/s(接近 1500 m/s,因标准盐度 35‰时需叠加盐度项,实际表层声速多在 1500-1540 m/s)。
深度增加后温度下降(如1000 米深度温度≈4°C),声速显著降低。1000 米水深对应压力≈100 个大气压,代入公式时压力项贡献≈1.6 m/s,随深度增加(压力增大),声速缓慢上升。
盐度每升高1‰,声速增加≈1.34 m/s。
图片来源于网络
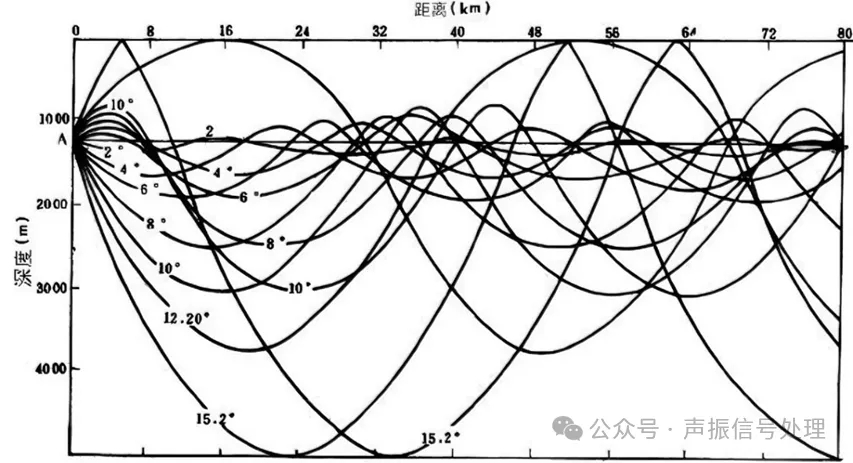
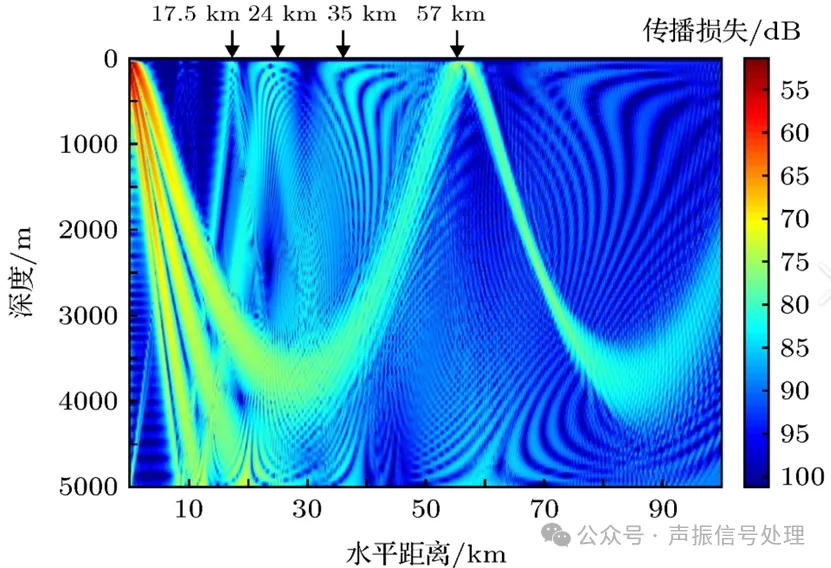
这种声速随深度的变化,形成了独特的 “深海声道”:
在特定深度区间内,声速达到最小值,声波在此区间内传播时,会因折射效应不断向声速最小值方向汇聚,能量衰减被大幅抑制,从而实现数千甚至上万公里的远距离传播。
这一现象成为声呐远距离探测的重要物理基础,也是主动声呐能实现远距目标探测、被动声呐能捕捉远距离目标噪声的关键前提。
图片来源于网络
能量衰减机制:
声波在传播中会因介质吸收、散射和扩散而损失能量:
吸收:由海水分子振动摩擦引起,高频声波吸收更剧烈;
散射:源于海水中小气泡、浮游生物等不均匀体;
扩散:则是因声波传播范围扩大导致的能量分散。
这些衰减规律决定了声呐的最大探测距离,也是信号处理中需要补偿的关键误差源。
四、声呐方程和声呐方位估计方法
1、声呐方程
声呐系统的性能评估与方案设计,高度依赖经典理论模型的量化支撑,其中声呐方程是贯穿系统设计全流程的核心理论工具,整合了水声信道传播特性、目标声学特征及声呐设备性能参数三大关键要素。
该方程的推导逻辑源于声呐的核心检测准则:当接收端的信号强度恰好能从背景干扰中被有效辨识,即满足 “信号级 = 背景掩蔽级” 的临界检测条件时,便可推导出对应的数学表达式。
声呐方程依据工作模式的差异,分为主动声呐方程与被动声呐方程两大核心形式,各形式的表达式需结合背景干扰类型或工作机制确定,具体如下:
主动声呐方程:
主动声呐通过发射声波并接收目标反射回波实现探测,其方程形式取决于主导背景干扰类型。
当背景干扰以环境噪声为主(回声探测)时,表达式为:

当背景干扰以混响为主(浅海或高散射环境)时,表达式为:

被动声呐方程:
被动声呐标准表达式修正为:

式中各参数均以dB表示,各参数物理含义如下:
检测阈值(Detection Threshold,DT):
在指定的检测概率和虚警概率下,声呐接收机能够可靠识别目标信号的最低信噪比(SNR),是声呐方程中判断目标能否被检测的关键阈值。
声源级(SL):
描述声呐发射换能器辐射声波的强度,其数值由发射功率、换能器效率及指向性共同决定,是表征声呐主动探测信号源强度的核心指标。
传播损失(TL):
指声波从发射换能器传播至目标或经目标反射传播至接收换能器的过程中,因能量扩散、介质吸收、海底/海面反射损耗等产生的能量衰减。传播损失是制约声呐探测距离的关键环境因素。其典型计算公式可拆解为扩展损失与吸收损失两部分(适用于球面扩展传播模型):

其中 r 为传播距离,α为海水的声吸收系数。
公式中两项的单位必须统一为 dB 才能相加,因此 r 的单位由α的单位和参考距离共同决定。
目标强度(TS):
反映目标对入射声波的反射能力,其数值与目标的几何尺寸、形状、材质及声波入射角度密切相关。
目标强度越大,意味着目标反射回波的能量越强,越易被声呐捕获。
接收噪声级(NL):
表征声呐接收端的总噪声水平,涵盖海洋环境噪声(如洋流噪声、生物噪声、船舶噪声)、声呐设备自身的热噪声与机械噪声等,是干扰目标回波识别的核心因素。
接收指向性指数(DI):
体现声呐接收换能器阵列对特定方向信号的汇聚能力。
指向性指数越高,代表阵列对目标方向信号的增益越强,同时对非目标方向的噪声与干扰的抑制效果越显著。
混响级(Reverberation Level,RL):
是表征声呐接收换能器所接收到的混响干扰强度。混响级是声呐自身发射的声波经海水介质内的散射体(如浮游生物、气泡、悬浮粒子)、海面或海底反射散射后返回接收端的干扰声信号的声强级。
2、声呐方位估计方法
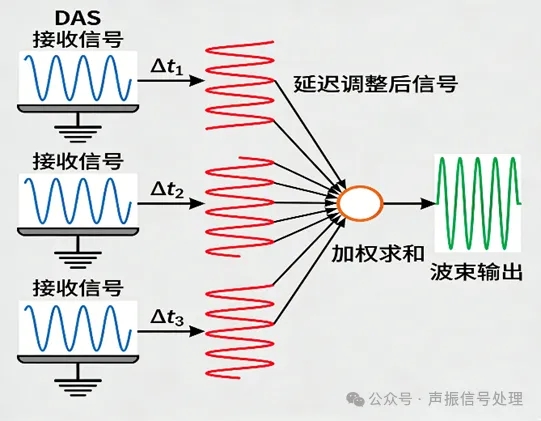
声呐方位估计(Direction of Arrival, DOA)是水下目标探测、定位与跟踪的核心环节,通过分析接收信号空间特征确定目标水平/垂直角度,精度直接决定目标定位误差与作战决策质量。其核心支撑为阵列信号处理波束形成方法,通过对多换能器阵列接收信号做相位补偿与加权合成,实现目标方位角精准判定。
方位估计本质利用声波到达阵列不同阵元的声程差,转化为相位差或时间差,进而计算目标方位角α。
声程差:
其中,d为阵元间距,α为方位角。
时间差:

其中,c 为水中声速,约 1500m/s。
相位差:

其中,f为信号频率,λ为波长
波束形成算法主要分为:传统非自适应、现代自适应及超分辨三类。
传统非自适应算法:以延迟-求和波束形成(DAS)为代表,凭借原理直观、计算量小、实时性强的优势,广泛应用于常规声呐实时探测系统。
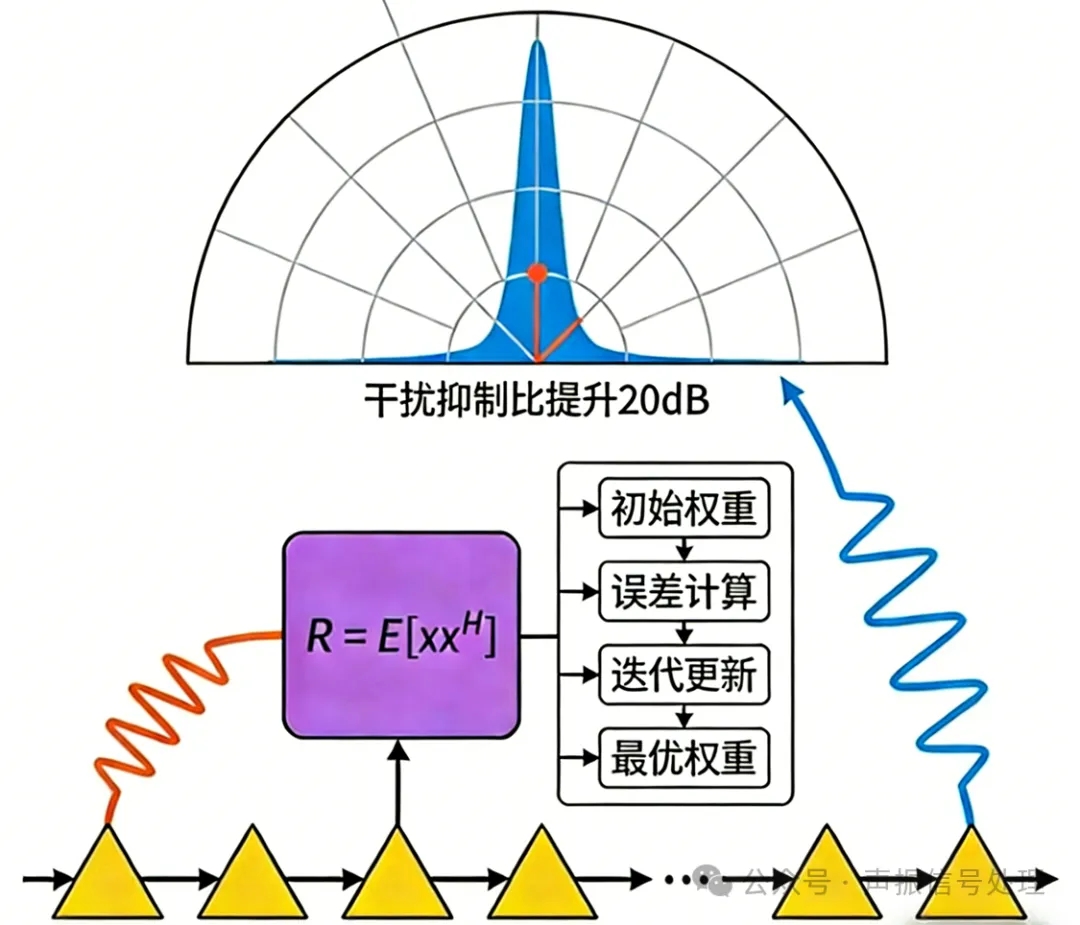
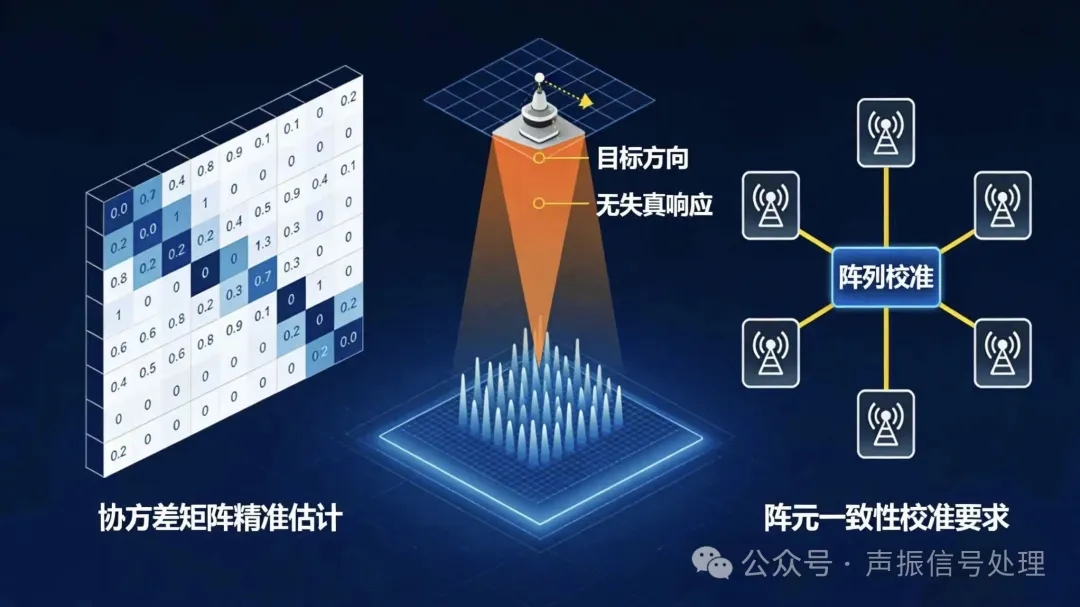
现代自适应算法:以最小方差无失真响应波束形成(MVDR)为核心,以目标方向信号无失真为约束,通过最小化阵列输出总功率抑制干扰噪声,提升方位估计精度,但对阵元一致性校准与协方差矩阵精准估计要求较高。
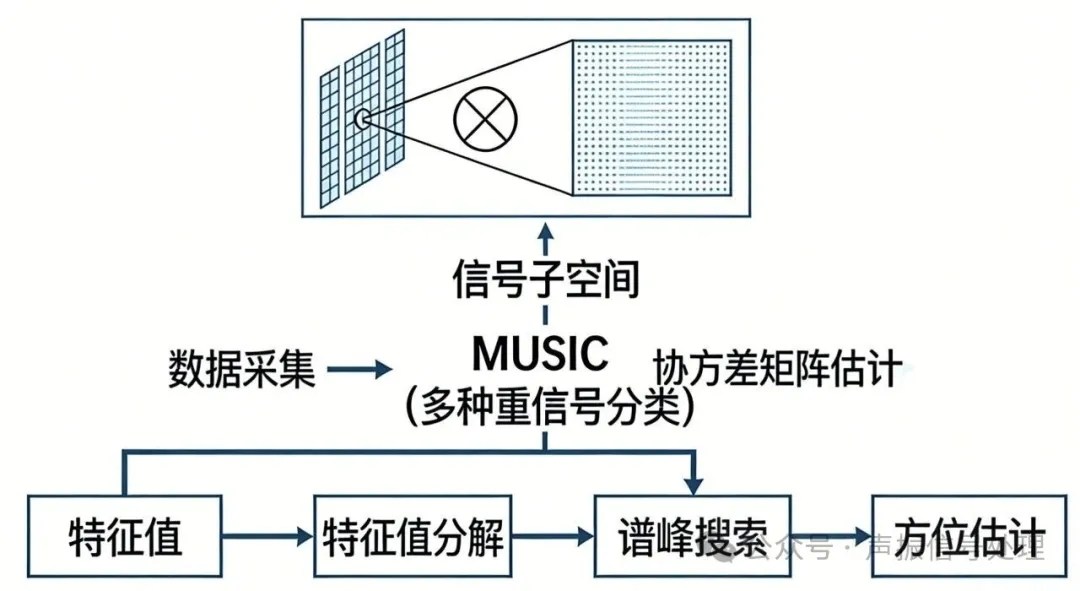
为突破传统算法的瑞利分辨极限,子空间分解超分辨算法应运而生。多信号分类算法(MUSIC)通过分解信号协方差矩阵得到信号与噪声子空间,借助二者正交性构建空间谱实现方位估计,分辨力优异,适用于近距离多目标密集场景,但对信噪比、阵元误差及阵列流形信息敏感。
五、声呐信号处理仿真
1、仿真设置
该仿真基于背景干扰以环境噪声为主的主动式声呐,其声呐方程如下所示:

(1)声呐相关参数:
发射声源级:SL = 220 dB (大功率主动声呐换能器典型发射级)
目标强度:TS = -15 dB (中型舰船目标的典型反射强度)
海洋环境噪声级:NL = 95 dB (近海航运繁忙区域的典型噪声级)
接收指向性指数:DI = 10 dB (10 元均匀线列阵的指向性增益)
检测阈值:DT = 10 dB (采用匹配滤波和5s非相干积累后的系统检测门槛)
(2)信号相关参数:
扫频范围: 5 kHz - 17 kHz
信号带宽:B =12 kHz
扫频时间: 50 ms
采样率:fs = 40 kHz
(3)其它参数
声波吸收系数:α = 0.2/1000 dB/m(等效 0.2 dB/km)
参考目标距离:500 m
参考声压:p0 = 1e-6 Pa
2、结果分析
(1)声源
声源( LFM,线性调频)信号的时域波形和频谱如下图所示:

(2)声波传播:声波在海里的旅程
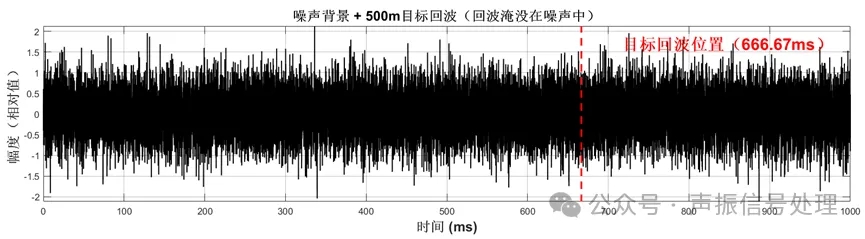
目标位置在500m外,声波往返一趟,会因为“越传越散”(扩散损失)和“被海水吸收”(吸收损失)造成能量损失,同时信号还会混进海洋背景噪声干扰。
回波经过衰减后幅度极微弱,叠加在噪声中无法通过波形识别,这就是真实声呐探测中“回波客观存在但被噪声掩盖”的实际状态。
(3)回波处理
这时候“脉冲压缩”就要发挥作用了:用频域匹配滤波处理接收信号后,原本的回波会变得“变尖变亮”。

(4)目标检测
有了清晰的信号,下一步就是“抓目标”。我们试了两种检测方法做对比,如下图所示。
上半部分是“固定阈值检测”:按预设噪声水平画一条红线,超过线的就算目标——但如果噪声忽大忽小,很容易漏检或误判;
下半部分是“CA-CFAR 检测”:它会盯着目标周围的区域“估噪声”,阈值跟着环境动态调整,哪怕噪声波动,也能稳稳锁定目标,虚警率比固定阈值低得多。

(5)计算理论数值
通过遍历传播距离r计算传播损失TL,再根据公式判断是否满足检测阈值DT,最后计算“声呐能探多远”,如下图所示。

需要说明是:
仿真仅聚焦常规近海基础参数,忽略了声线弯曲、海底反射差异等关键因素,并且未考虑高声强下的非线性畸变,缺失浅海界面混响、多途传播叠加及载体噪声等干扰源。
总结:
声呐是利用声波探索水下世界的关键技术,是人类在海洋中的“第二双眼睛”。它从简单的回声测深发展而来,如今已成为集物理学、信号处理、海洋学和计算机科学于一体的高科技系统。
声呐探测的意义远不止于一项技术,它是人类突破海洋屏障、拓展水下认知能力的基石性工具。它实现了人类对占地球表面71%的海洋内部空间的“感知权”和“知情权”。
可以说,没有声呐,现代海洋科学、水下国防和海洋产业都将无从谈起。它彻底改变了人类与海洋的关系,让人类从一个只能观察海面的物种,成长为能够聆听和解读海洋深处奥秘的探索者。

Copyright © 2018,All rights reserved 广州辰方互联信息科技有限公司 版权所有 备案号:粤ICP备18085845号
联系电话:020-37681030
销售热线:18520175978(微信同号)
公司地址: 广州市海珠区红卫新村西街29号UP智谷B1栋417室